STM32 LibOpenCM3:I2C
前言
在上一篇中,我簡單介紹了 SPI 的用法,而除了 SPI 外還有另一種非常常見的通訊協定——I²C(以下稱 I2C)。
I2C 和 SPI 一樣是主從式架構,I2C 的主要特色就是無論有多少 Slave device 都只需要兩條線就可以完成通訊。
在這一篇文章中,我不會詳細介紹 I2C 本身,但建議還是要對它有基本的瞭解比較好,在此推薦「I2C bus 簡介 (Inter-Integrated Circuit Bus) @ 傑克! 真是太神奇了!」及「【Day21】I2C的介紹 - iT 邦幫忙」這兩篇文章。
24C256 是一個擁有 I2C 介面的 EEPROM,這次將示範如何使用 STM32 來透過 I2C 對其進行資料的讀寫,且可以用 USART 進行操作。
正文
首先一樣以 Nucleo-F446RE 做示範。
首先建立一個 PIO 的專案,選擇 Framework 為「libopencm3」,並在 src/ 資料夾中新增並開啓 main.c 與 main.h。
完整程式
/** * @file main.c * @brief I2C EEPROM (24C256) example for STM32 Nucleo-F446RE. */
#include "main.h"
int main(void){ rcc_setup(); i2c_setup(); usart_setup();
while (1) { } return 0;}
static void rcc_setup(void){ rcc_clock_setup_pll(&rcc_hse_8mhz_3v3[RCC_CLOCK_3V3_84MHZ]);
rcc_periph_clock_enable(RCC_I2C_GPIO); rcc_periph_clock_enable(RCC_I2C1); rcc_periph_clock_enable(RCC_USART_TXRX_GPIO); rcc_periph_clock_enable(RCC_USART2);}
static void i2c_setup(void){ /* Set SCL & SDA pin to open-drain alternate function. */ gpio_mode_setup(GPIO_I2C_PORT, GPIO_MODE_AF, GPIO_PUPD_NONE, GPIO_I2C_SCL_PIN | GPIO_I2C_SDA_PIN);
gpio_set_output_options(GPIO_I2C_PORT, GPIO_OTYPE_OD, GPIO_OSPEED_50MHZ, GPIO_I2C_SCL_PIN | GPIO_I2C_SDA_PIN);
gpio_set_af(GPIO_I2C_PORT, GPIO_I2C_AF, GPIO_I2C_SCL_PIN | GPIO_I2C_SDA_PIN);
uint32_t i2c = I2C1;
i2c_peripheral_disable(i2c); i2c_reset(i2c);
i2c_set_speed(i2c, i2c_speed_fm_400k, /* 400 kHz Fast mode. */ rcc_apb1_frequency / 1e6); /* I2C clock in MHz. */
i2c_peripheral_enable(i2c);}
static void usart_setup(void){ /* Set USART-Tx & Rx pin to alternate function. */ gpio_mode_setup(GPIO_USART_TXRX_PORT, GPIO_MODE_AF, GPIO_PUPD_NONE, GPIO_USART_TX_PIN | GPIO_USART_RX_PIN);
gpio_set_af(GPIO_USART_TXRX_PORT, GPIO_USART_AF, GPIO_USART_TX_PIN | GPIO_USART_RX_PIN);
/* Setup interrupt. */ nvic_enable_irq(NVIC_USART2_IRQ); usart_enable_rx_interrupt(USART2);
/* Config USART params. */ usart_set_baudrate(USART2, USART_BAUDRATE); usart_set_databits(USART2, 8); usart_set_stopbits(USART2, USART_STOPBITS_1); usart_set_parity(USART2, USART_PARITY_NONE); usart_set_flow_control(USART2, USART_FLOWCONTROL_NONE); usart_set_mode(USART2, USART_MODE_TX_RX);
usart_enable(USART2);}
static void delay(uint32_t value){ for (uint32_t i = 0; i < value; i++) { __asm__("nop"); /* Do nothing. */ }}
/** * @brief USART2 Interrupt service routine. */void usart2_isr(void){ usart_disable_rx_interrupt(USART2);
uint8_t cmd = usart_recv(USART2); if (cmd == 0x00) /* Write command. */ { uint8_t i2c_rx_data[1]; uint8_t i2c_tx_data[3]; i2c_tx_data[0] = usart_recv_blocking(USART2); /* Address 1. */ i2c_tx_data[1] = usart_recv_blocking(USART2); /* Address 2. */ i2c_tx_data[2] = usart_recv_blocking(USART2); /* Data. */
i2c_transfer7(I2C1, I2C_SLAVE_ADDRESS, i2c_tx_data, /* Tx data array. */ 3, /* Tx data length. */ i2c_rx_data, /* Rx data array. */ 0); /* Rx data lenght. */
usart_send_blocking(USART2, 0xF0); /* Write done ACK. */ } else if (cmd == 0x01) /* Read command. */ { uint8_t i2c_rx_data[1]; uint8_t i2c_tx_data[2]; i2c_tx_data[0] = usart_recv_blocking(USART2); /* Address 1. */ i2c_tx_data[1] = usart_recv_blocking(USART2); /* Address 2. */
i2c_transfer7(I2C1, I2C_SLAVE_ADDRESS, i2c_tx_data, /* Tx data array. */ 2, /* Tx data length. */ i2c_rx_data, /* Rx data array. */ 1); /* Rx data lenght. */
usart_send_blocking(USART2, i2c_rx_data[0]); } else /* Unknown command. */ { usart_send_blocking(USART2, 0xFF); }
/* Clear 'Read data register not empty' flag. */ USART_SR(USART2) &= ~USART_SR_RXNE; usart_enable_rx_interrupt(USART2);}/** @file main.h */
#ifndef MAIN_H#define MAIN_H
#include <libopencm3/stm32/rcc.h>#include <libopencm3/stm32/gpio.h>#include <libopencm3/stm32/i2c.h>#include <libopencm3/stm32/usart.h>#include <libopencm3/cm3/nvic.h>
#define I2C_SLAVE_ADDRESS ((uint8_t)0x50)#define USART_BAUDRATE (9600)
#define RCC_I2C_GPIO (RCC_GPIOB)#define GPIO_I2C_PORT (GPIOB)#define GPIO_I2C_SCL_PIN (GPIO8) /* D15. */#define GPIO_I2C_SDA_PIN (GPIO9) /* D14. */#define GPIO_I2C_AF (GPIO_AF4) /* Ref: Table-11 in DS10693. */
#define RCC_USART_TXRX_GPIO (RCC_GPIOA)#define GPIO_USART_TXRX_PORT (GPIOA)#define GPIO_USART_TX_PIN (GPIO2) /* ST-Link (D1). */#define GPIO_USART_RX_PIN (GPIO3) /* ST-Link (D0). */#define GPIO_USART_AF (GPIO_AF7) /* Ref: Table-11 in DS10693. */
static void rcc_setup(void);static void i2c_setup(void);static void delay(uint32_t value);static void usart_setup(void);
#endif /* MAIN_H. */分段說明
Include
#include <libopencm3/stm32/rcc.h>#include <libopencm3/stm32/gpio.h>#include <libopencm3/stm32/i2c.h>#include <libopencm3/stm32/usart.h>#include <libopencm3/cm3/nvic.h>除了基本的 rcc.h 和 gpio.h 及這次的 i2c.h 外,因為我要使用 USART 和中斷功能,所以還會需要 usart.h 與 nvic.h。
設定 I2C
static void i2c_setup(void){ /* Set SCL & SDA pin to open-drain alternate function. */ gpio_mode_setup(GPIO_I2C_PORT, GPIO_MODE_AF, GPIO_PUPD_NONE, GPIO_I2C_SCL_PIN | GPIO_I2C_SDA_PIN);
gpio_set_output_options(GPIO_I2C_PORT, GPIO_OTYPE_OD, GPIO_OSPEED_50MHZ, GPIO_I2C_SCL_PIN | GPIO_I2C_SDA_PIN);
gpio_set_af(GPIO_I2C_PORT, GPIO_I2C_AF, GPIO_I2C_SCL_PIN | GPIO_I2C_SDA_PIN);
uint32_t i2c = I2C1;
i2c_peripheral_disable(i2c); i2c_reset(i2c);
i2c_set_speed(i2c, i2c_speed_fm_400k, /* 400 kHz Fast mode. */ rcc_apb1_frequency / 1e6); /* I2C clock in MHz. */
i2c_peripheral_enable(i2c);}首先一樣先設定好 I2C 要使用的 SCL 與 SDA 接腳,將其設為 Open-Drain 的 AF 功能。
再來要設定 I2C 本身。不同於 SPI 規定比較寬鬆(或說自由),I2C 本身的通訊規範基本上都定義好了,所以我們需要調整(或說可以調整)的設定就很少。這裡我們只需要設定要使用的 I2C 速度即可。
24C256 支援的 I2C 速度模式有:
- Standard mode: 100 kbps
- Fast mode: 400 kbps
- Fast mode Plus: 1Mbps
這裡我選擇使用「Fast mode」。以 i2c_set_speed() 函式進行設定,此函式的第二個引數 i2c_speed_fm_400k 就代表要使用「Fast mode」,而第三個引數要給的是 I2C 的時脈,對於 F446RE 或大多數的 STM32,這個速度等同 APB1。
USART ISQ
/** * @brief USART2 Interrupt service routine. */void usart2_isr(void){ usart_disable_rx_interrupt(USART2);
uint8_t cmd = usart_recv(USART2); if (cmd == 0x00) /* Write command. */ { uint8_t i2c_rx_data[1]; uint8_t i2c_tx_data[3]; i2c_tx_data[0] = usart_recv_blocking(USART2); /* Address 1. */ i2c_tx_data[1] = usart_recv_blocking(USART2); /* Address 2. */ i2c_tx_data[2] = usart_recv_blocking(USART2); /* Data. */
i2c_transfer7(I2C1, I2C_SLAVE_ADDRESS, i2c_tx_data, /* Tx data array. */ 3, /* Tx data length. */ i2c_rx_data, /* Rx data array. */ 0); /* Rx data lenght. */
usart_send_blocking(USART2, 0xF0); /* Write done ACK. */ } else if (cmd == 0x01) /* Read command. */ { uint8_t i2c_rx_data[1]; uint8_t i2c_tx_data[2]; i2c_tx_data[0] = usart_recv_blocking(USART2); /* Address 1. */ i2c_tx_data[1] = usart_recv_blocking(USART2); /* Address 2. */
i2c_transfer7(I2C1, I2C_SLAVE_ADDRESS, i2c_tx_data, /* Tx data array. */ 2, /* Tx data length. */ i2c_rx_data, /* Rx data array. */ 1); /* Rx data lenght. */
usart_send_blocking(USART2, i2c_rx_data[0]); } else /* Unknown command. */ { usart_send_blocking(USART2, 0xFF); }
/* Clear 'Read data register not empty' flag. */ USART_SR(USART2) &= ~USART_SR_RXNE; usart_enable_rx_interrupt(USART2);}這是 USART 的 ISQ。
我自己定義了一個簡單的 USART 指令格式:<RW> <Address_1> <Address_2> <Data>
若要在 24C256 的 0x0102 位置寫入資料 0xAB,就是用 USART 傳送:0x00 0x01 0x02 0xAB,完成後會收到一個 0xF0 作為 ACK 確認。同理,要在 0x0FCD 寫入 0x40 拿就是要傳送 0x00 0x0F 0xCD 0x40。
要讀取 0x0102 位置的資料的話,那就是用 USART 傳送:0x01 0x01 0x02,然後 STM32 就會回傳該位置的資料。
24C256 的定址範圍為
0x0000~0x7FFF共 32768 個位置,每個位置皆為一個 Byte。
當 USART 接收到一筆資料時,會先判斷這是要進行寫(0x00)還是讀(0x01)。然後再使用 I2C 傳送資料。
i2c_transfer7() 用來進行 I2C 的傳輸,讀和寫都靠它。其參數意義依序為:
- 使用的 I2C。這裡是用
I2C1。 - 要溝通的 Slave device I2C 7-bit 位置。24C256 的預設位置為
0x50。 - 傳送資料陣列,即要傳送的位元組陣列。
- 傳送資料長度,要傳送幾個 Byte。填
0代表不進行傳送。 - 接收資料陣列,接收到的資料會存進來。
- 接收資料長度,要接收幾個 Byte。填
0代表不進行接收。
24C256 基本的讀寫操作也是很簡單。要寫的話就是依序傳送「位置-高、位置-低、資料」這 3 個位元組即可。要讀的話就是依序傳送「位置-高、位置-低」這 2 個位元組,然後就可以讀取 該位置的資料位元組。
因此寫入的程式為:
uint8_t i2c_rx_data[1];uint8_t i2c_tx_data[3];i2c_tx_data[0] = usart_recv_blocking(USART2); /* Address 1. */i2c_tx_data[1] = usart_recv_blocking(USART2); /* Address 2. */i2c_tx_data[2] = usart_recv_blocking(USART2); /* Data. */
i2c_transfer7(I2C1, I2C_SLAVE_ADDRESS, i2c_tx_data, /* Tx data array. */ 3, /* Tx data length. */ i2c_rx_data, /* Rx data array. */ 0); /* Rx data lenght. */而讀取的程式為:
uint8_t i2c_rx_data[1];uint8_t i2c_tx_data[2];i2c_tx_data[0] = usart_recv_blocking(USART2); /* Address 1. */i2c_tx_data[1] = usart_recv_blocking(USART2); /* Address 2. */
i2c_transfer7(I2C1, I2C_SLAVE_ADDRESS, i2c_tx_data, /* Tx data array. */ 2, /* Tx data length. */ i2c_rx_data, /* Rx data array. */ 1); /* Rx data lenght. */
usart_send_blocking(USART2, i2c_rx_data[0]);多環境程式(F446RE + F103RB)
由於 STM32F1 的部分函式不同,所以 F103RB 沒辦法直接使用上面的 F446RE 的程式。
由於本例的差異比較大,為了不佔版面這裡就不列出的,完整的程式請看 GitHub repo。
特別要主要的是,F103RB 要使用 PB8 和 PB9 作為 I2C 的 SCL 及 SDA 腳時,要啓用「Remap」。詳細請參考 DS5319 的 Table 5。
static void i2c_setup(void){ /* Set SCL & SDA pin to open-drain alternate function. */#if defined(STM32F1) gpio_set_mode(GPIO_I2C_PORT, GPIO_MODE_OUTPUT_50_MHZ, GPIO_CNF_OUTPUT_ALTFN_OPENDRAIN, GPIO_I2C_SCL_PIN | GPIO_I2C_SDA_PIN);
/* * Alternate function remap is required for * using I2C1_SCL & SDA on PB8 & PB9. * Refer to Table-5 in DS5319. */ gpio_primary_remap(AFIO_MAPR_SWJ_CFG_FULL_SWJ, AFIO_MAPR_I2C1_REMAP);#else gpio_mode_setup(GPIO_I2C_PORT, GPIO_MODE_AF, GPIO_PUPD_NONE, GPIO_I2C_SCL_PIN | GPIO_I2C_SDA_PIN);
gpio_set_output_options(GPIO_I2C_PORT, GPIO_OTYPE_OD, GPIO_OSPEED_50MHZ, GPIO_I2C_SCL_PIN | GPIO_I2C_SDA_PIN);
gpio_set_af(GPIO_I2C_PORT, GPIO_I2C_AF, GPIO_I2C_SCL_PIN | GPIO_I2C_SDA_PIN);#endif uint32_t i2c = I2C1;
i2c_peripheral_disable(i2c); i2c_reset(i2c);
i2c_set_speed(i2c, i2c_speed_fm_400k, /* 400 kHz Fast mode. */ rcc_apb1_frequency / 1e6); /* I2C clock in MHz. */
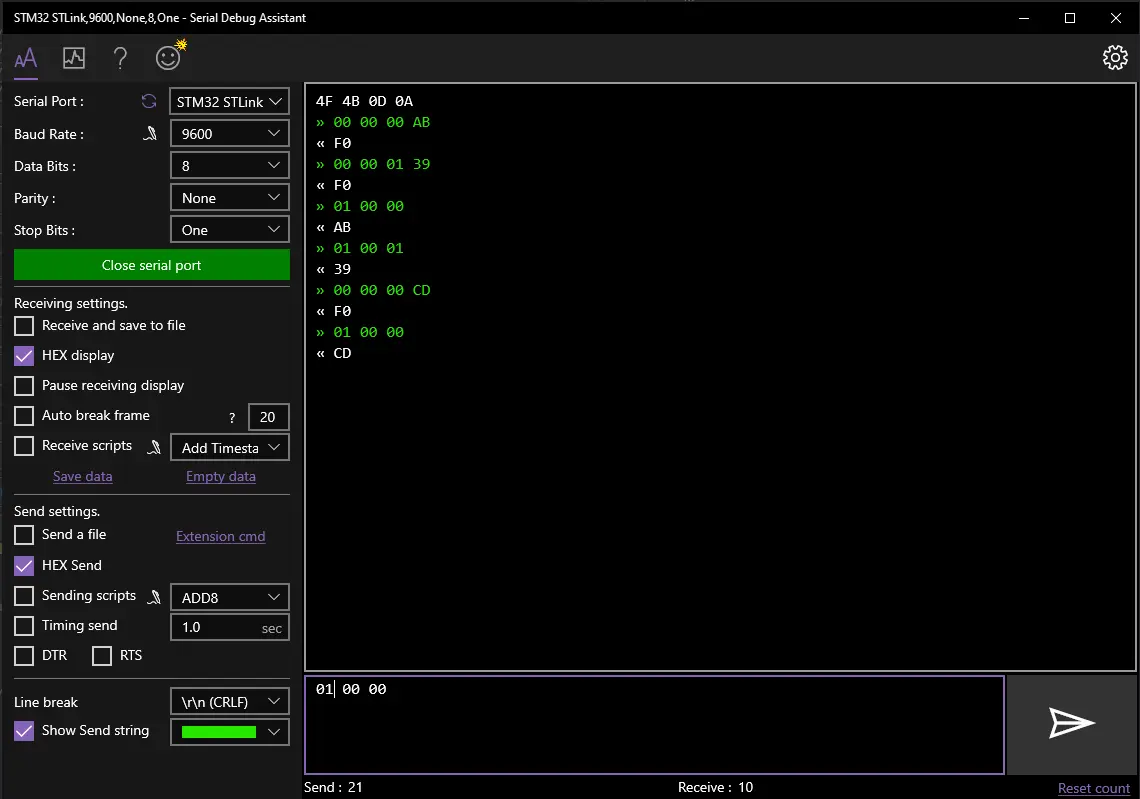
i2c_peripheral_enable(i2c);}成果
我首先將 0xAB 寫入 0x0000 (00 00 00 AB),再寫入 0x39 到 0x0001(00 00 01 39)。
然後讀取 0x0000(01 00 00)得到回傳的 0xAB,再讀取 0x0001(01 00 01)得到 0x39。
最後再次寫入 0xCD 到 0x0000(00 00 00 CD),再讀取它(01 00 00)得到 0xCD。
小結
這次介紹了 I2C 的程式寫法。SPI 與 I2C 是各種電路模組或 IC 會使用的通訊協定,只要會使用 SPI 與 I2C,那基本上常見的模組都可以使用了,因此 I2C 是一個很重要的功能,還好 STM32 本身的硬體及 LibOpenCM3 都把那些複雜的設定做好了,因此要使用 I2C 相當容易。
參考資料
本文的程式也有放在 GitHub 上。 本文同步發表於iT 邦幫忙-2022 iThome 鐵人賽。